Aufbau eines BLDC-Motors


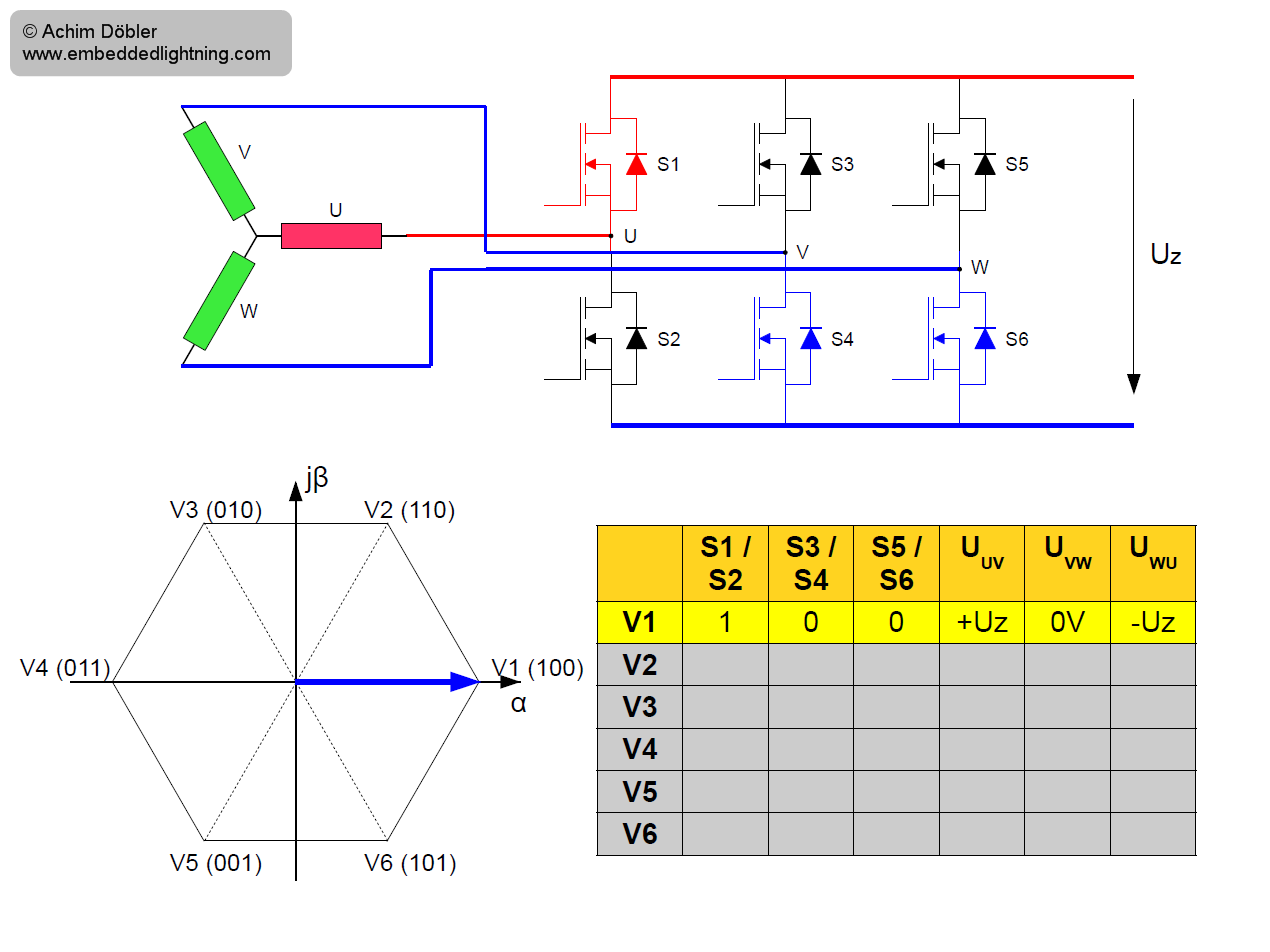
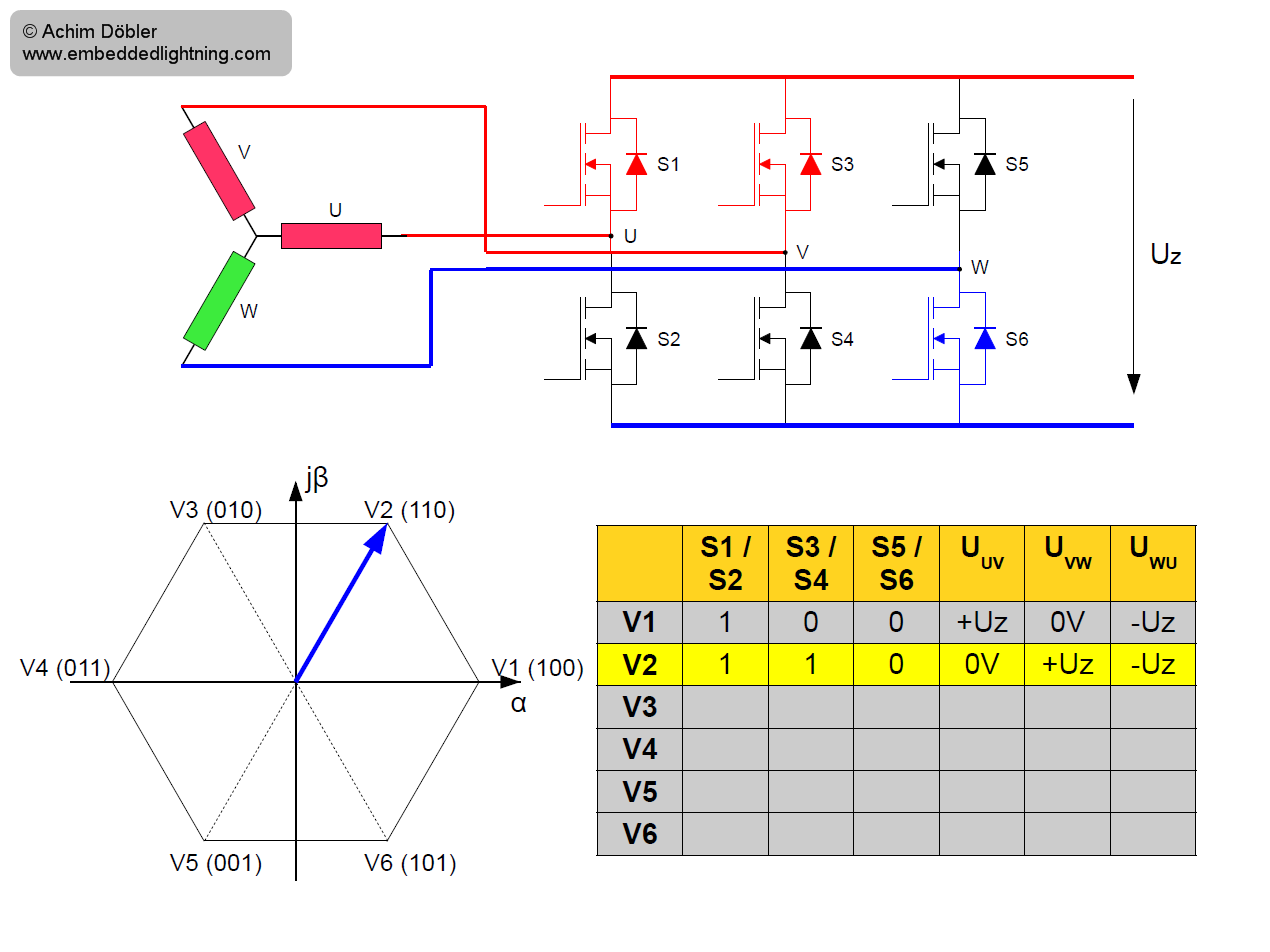
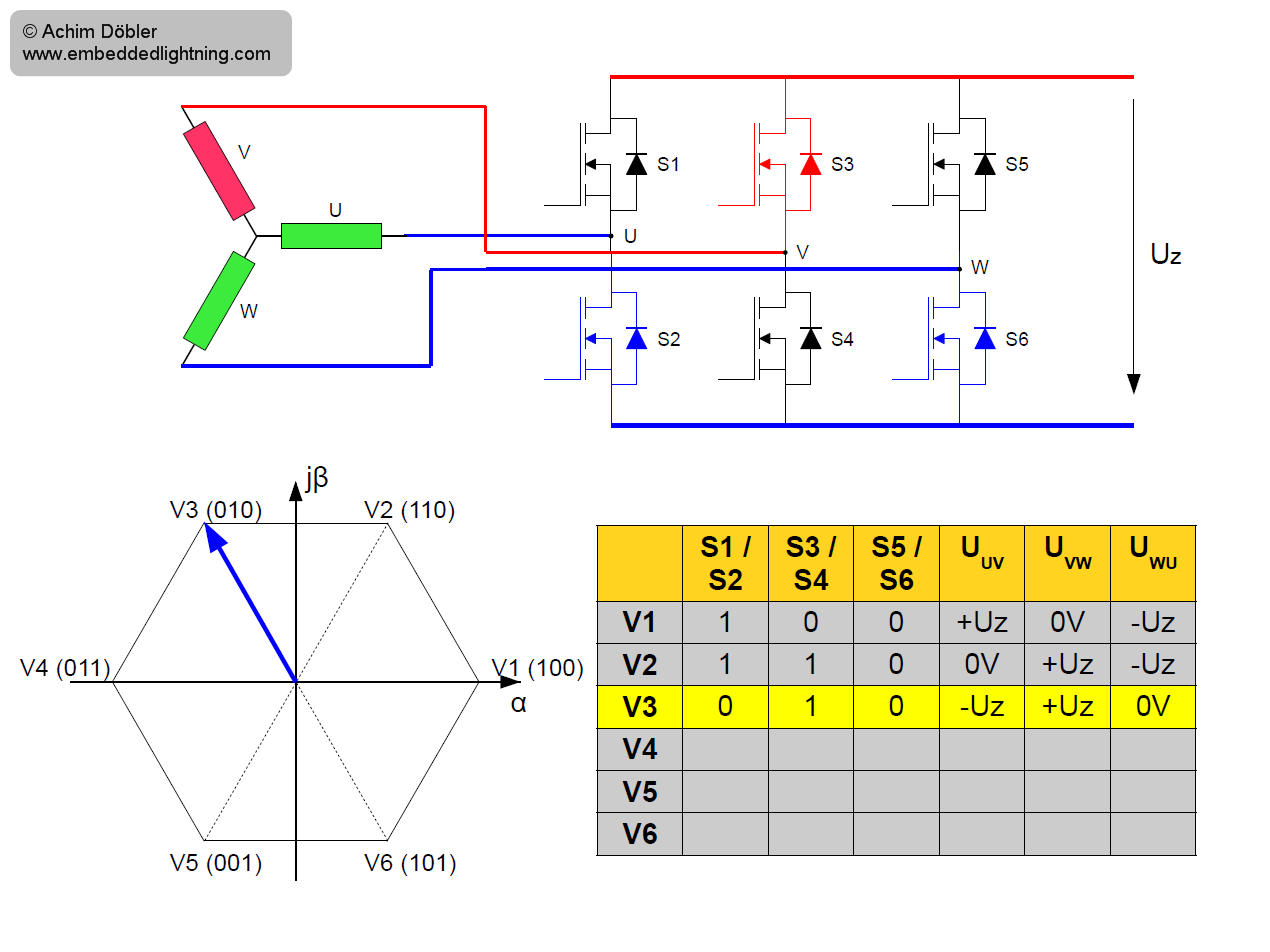
Raumzeiger



Raumzeiger: Sinus PWM

Ansteuerung der 3-Phasen-Brücke
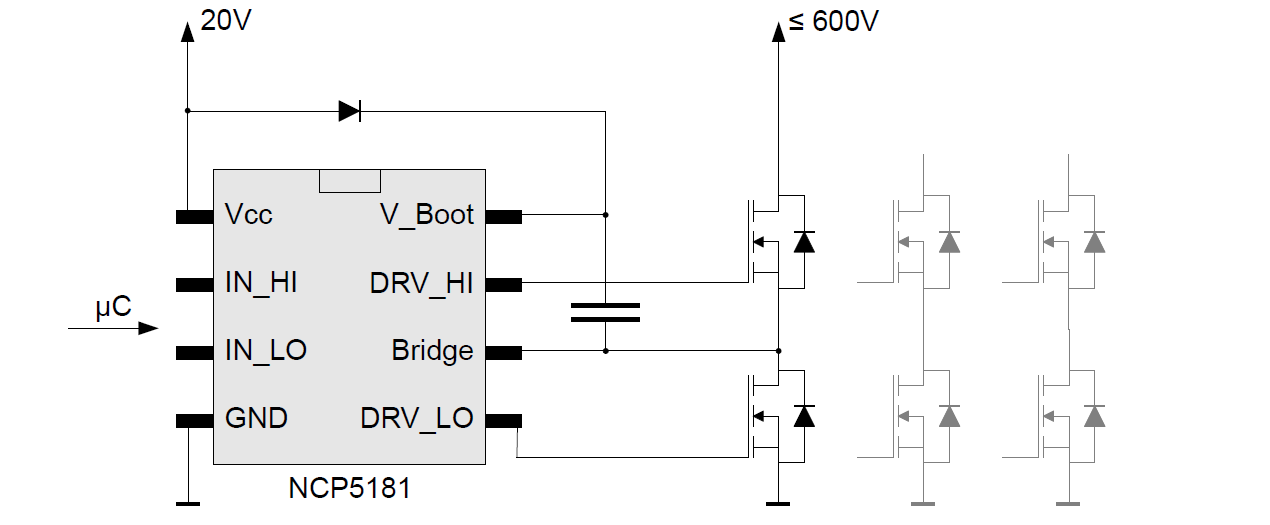
Beispiel eines MOS-FET Treibers
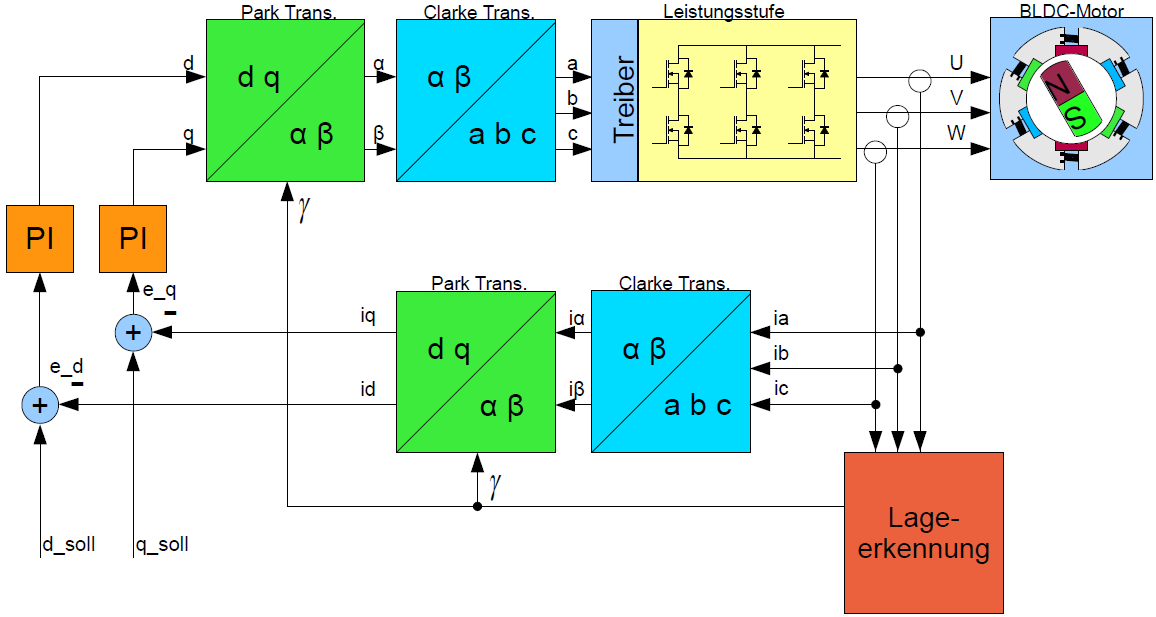
Blockschaltbild: BLDC-Motor mit Leistungsstufe

- Drei Halbbrücken müssen angesteuert werden!
- Sind hierfür drei Regler notwendig?
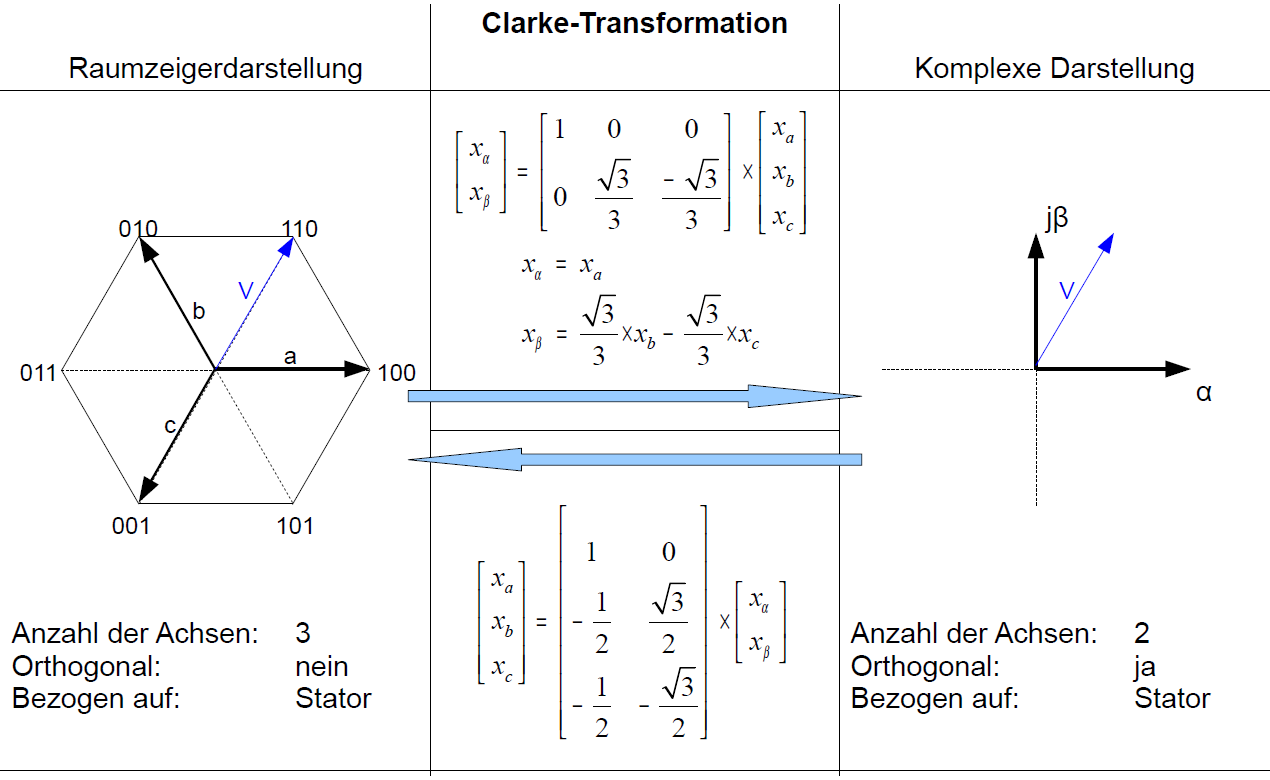
Clarke Transformation
Blockschaltbild: Clarke Transformation ergänzt

- Nur noch zwei Größen müssen geregelt werden!
- Problem: beide Größen müssen ständig verändert werden!
Park Transformation
Vergleich Gleichstrommotor:
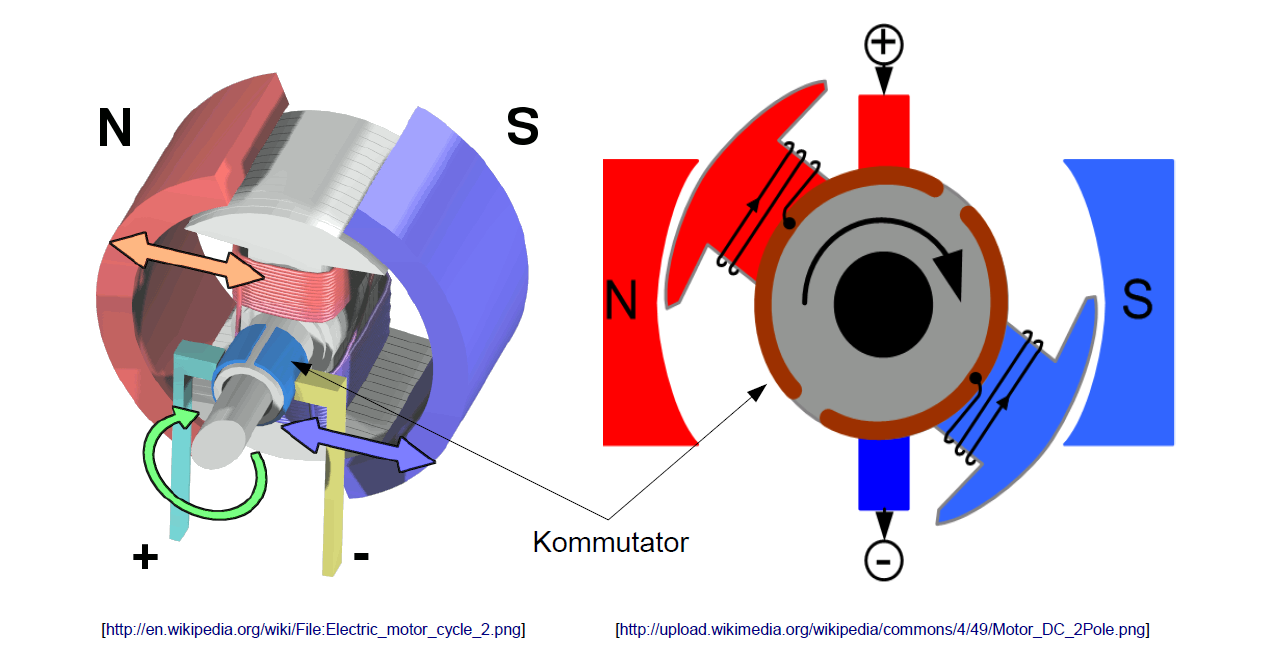
- Rotation bzw. Drehfeld wird durch Kommutator "erzeugt".
- Regler muss kein Drehfeld erzeugen!
- → Einfache Regelung von Gleichstrommotoren!

Blockschaltbild: Park Transformation ergänzt
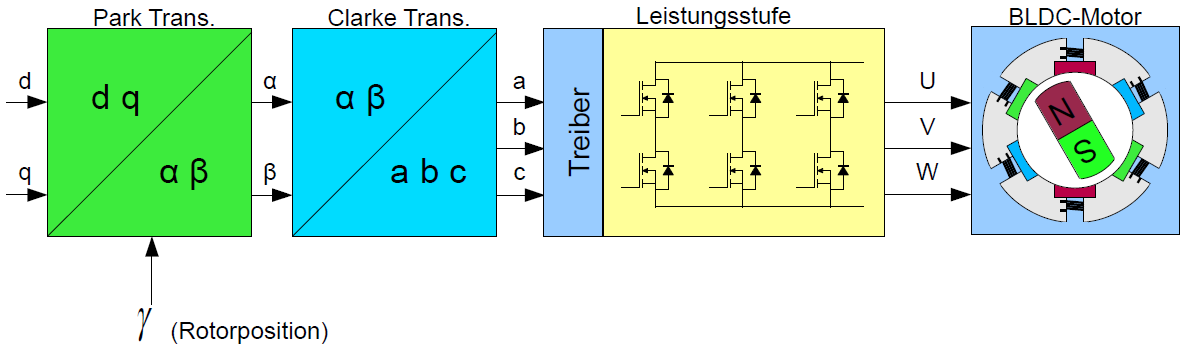
- Konstante d/q-Werte führen zu veränderlichen Strangwerten!
Regelung
Für die Regelung wird zunächst eine Sinustabelle benötigt (z.B 50 Werte / 180°)

Blockschaltbild: PI-Regler ergänzt

Prinzipieller Aufbau eines PI-Reglers:
void isr( void )
{
static int e_q_int, e_d_int;
q_ist = read ( Q_IST ); /* q-Istwert einlesen */
d_ist = read ( D_IST ); /* d-Istwert einlesen */
e_q = q_soll - q_ist; /* q-Fehler berechnen */
e_d = d_soll - d_ist; /* d-Fehler berechnen */
e_q_int = e_q_int + e_q; /* q-Fehler integrieren */
e_d_int = e_d_int + e_d; /* d-Fehler integrieren */
if ( e_q_int > E_Q_INT_MAX ) e_q_int = E_Q_INT_MAX; /* e_q_int begrenzen */
if ( e_q_int < E_Q_INT_MIN ) e_q_int = E_Q_INT_MIN; /* e_q_int begrenzen */
if ( e_d_int > E_D_INT_MAX ) e_d_int = E_D_INT_MAX; /* e_d_int begrenzen */
if ( e_d_int < E_D_INT_MIN ) e_d_int = E_D_INT_MIN; /* e_d_int begrenzen */
y_q = e_q * KP_Q + e_q_int * KI_Q; /* q-Stellgroesse berechnen */
y_d = e_d * KP_D + e_d_int * KI_D; /* d-Stellgroesse berechnen */
dq_to_pwm ( y_d, y_q ); /* PWM aktualisieren */
}
Blockschaltbild: Führungsgrößen ergänzt

Blockschaltbild: Strommessung ergänzt

Blockschaltbild: geschlossener Regelkreis

Blockschaltbild: Lageerkennung ergänzt
Prinzipieller Aufbau der Lageerkennung:
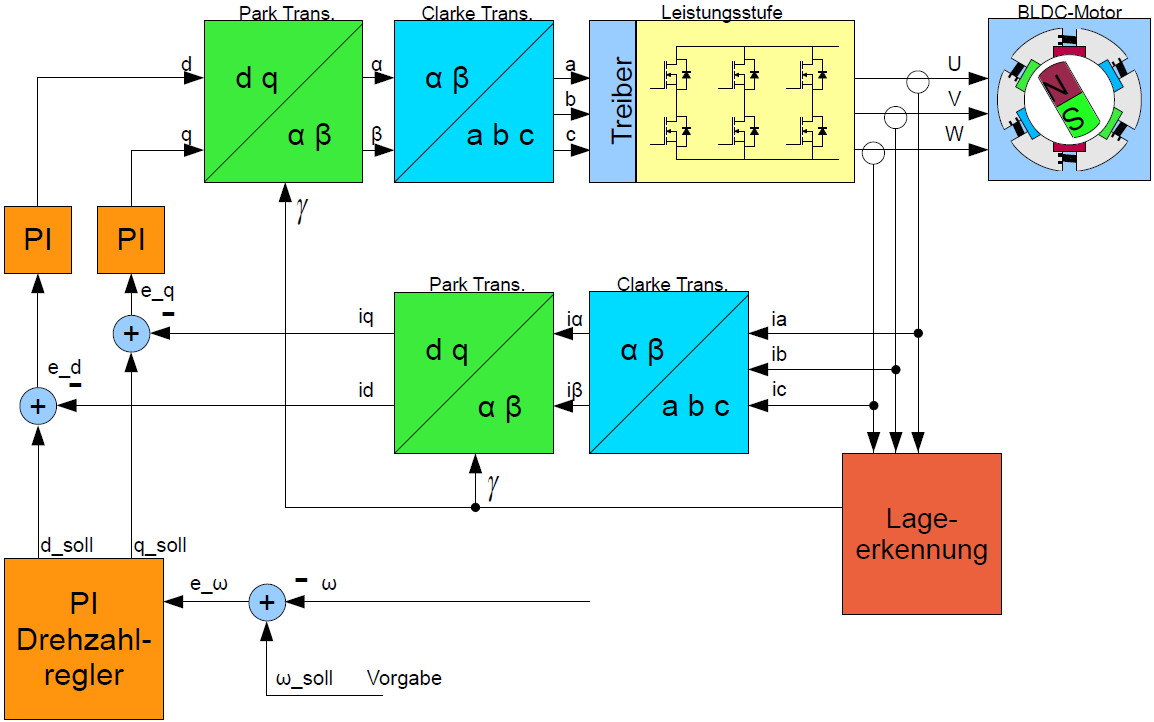
Blockschaltbild: PI-Drehzahlregler ergänzt
Blockschaltbild: Vollständiger feldorientierter Drehzahlregler

Eigene Projekte zu diesem Thema:
STM32-basierter Frequenzumrichter zur Ansteuerung einer Lichtmaschine:
![]()
![]()


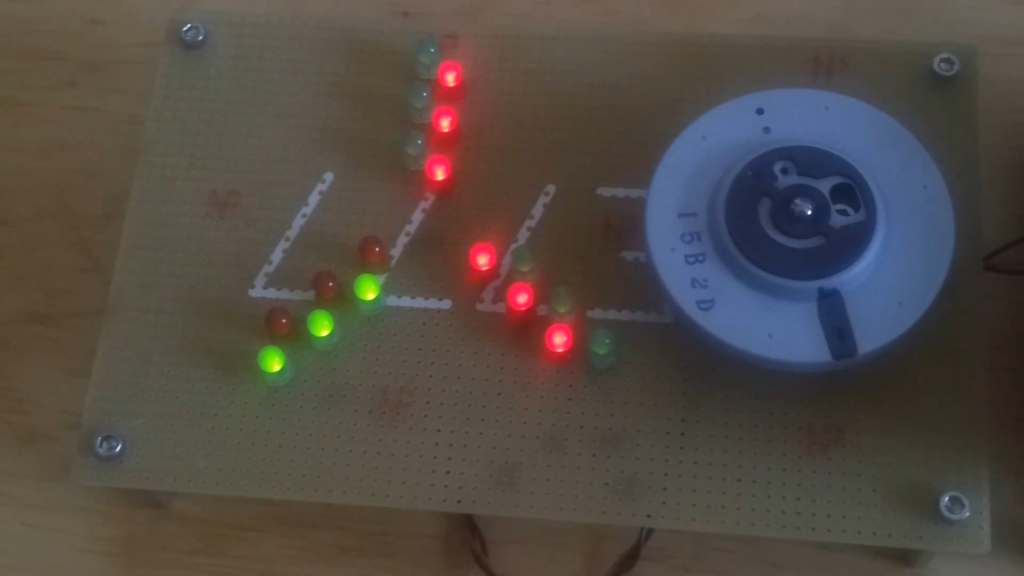
Geberlose Raumzeigermodulation bei einem BLDC-Motor:
![]()

dsPIC33-basierter feldorientierter Regler:
![]()

Hallo Achim,
vielen Dank für die ausführliche Erklärung.
Darf ich ergänzen, dass es sich bei den gezeigten Transformationen korrekterweise um die inverse Park bzw inverse Clark Transformation handelt.
Bei einer Regelung, üblicherweise feldorientierte Regelung, wird die Clark- bzw Park-Transformation bei der Verarbeitung der Strangströme verwendet, um die Regelgrößen d und q zu erhalten und diese durch zwei "einfache" PI-Regler zu führen.
Viele Grüße
Frank
Hallo Frank, vielen Dank für Dein Feedback! Natürlich, du hast vollkommen Recht, in meinen Blockschaltbildern werden die Transformationen natürlich invers ausgeführt – ich werde das bei Gelegenheit korrigieren! Ich habe noch Unterlagen zur Regelung und werde diese ebenfalls ergänzen. Das Elegante der d/q – Transformationen ist meiner Meinung nach, dass man sich quasi mit dem Regler auf den Rotor “setzt” und dort das Drehmoment und die Erregung bequem regeln kann. Man wandelt ein statorfestes Koordinatensystem in ein rotorfestes. Arbeitest du in dem Bereich oder ist es auch dein Hobby? Gruß Achim
hi 🙂 i like what you do 🙂 and i find it so usefull 🙂 is it possible to impliment this work on STM32F4O7VG ? and if yes can you tell me how and thank you 🙂
Hi Tarek, thanks for your comment! The STM32 has a floating point unit, therefore it is much easier to implement the d/q transform algorithm. I’ll try to post some example projects in a few days. Achim
Hallo Achim,
die Motoren gehören zu meinem Job.
Die OLEDs sind für mein Hobbyprojekt.
Gruß
Frank
Hello,
Can you please share your code for dsPIC33 mcu ? If possible with schematic to drive the motor ?
Thank you in advance,
Emil
Hello,Mr.Achim!
nice project!
I also want to make a controller for my EV,
would u like to share about the schematic and the programmer?
Looking forward your reply~!
Thank you !
Marecal
beim bldc motor wird eine phase mit der betriebsspannung verbunden, eine mit der Masse und andere hängt in der Luft oder? Oben haben alle phasen immer einen definierten Zustand. (?)
Hi Oleg,
nein, nicht ganz. Schau mal hier:
http://embeddedlightning.com/bldc_motor/
Gruß
Achim
Hallo Achim,
In einem deiner Video dreht sich die Lichtmaschine sehr sehr langsam.
ich nehme an, dass der Schätzalgorithmus nicht runter bis 0 Hz funktioniert. Ab welcher Frequenz schaltest du vom “Forced mode/Stromeinprägungs Mode” auf den Regelungsmodus um?
Eine weitere Frage die auf die Änderungsgeschwingigkeit eines anliegendem Drehmoments abzielt: Darf sich das vom Motor abgegebene Drehmoment beliebig schnell ändern, oder benötigt man ab einer Grenze ein zusätzliches Trägheitsmoment zum Dämpfen der Änderung (Winkelbeschleunigung)?
Auf jeden Fall Danke für das publizieren, dieses speziellen Themas!!
Pingback: clindamicina phosphate topical
Pingback: ItMe.Xyz
Pingback: blue french bulldog
Pingback: live adult webcams
Pingback: cheap adult webcams
Pingback: free adult webcams
Pingback: my free cams
Pingback: sex shows
Pingback: cheap sex cams
Pingback: in vitro fertilization mexico
Pingback: houston tx salons
Pingback: french bulldog texas
Pingback: floodle
Pingback: how to get my dog papers
Pingback: french bulldog puppies near me
Pingback: acupuncture fort lee
Pingback: clima en neza
Pingback: culiacan clima
Pingback: cuautitlan izcalli clima
Pingback: cuautitlan izcalli clima
Pingback: atizapán de zaragoza clima
Pingback: atizapán de zaragoza clima
Pingback: clima en chimalhuacan
Pingback: clima en chimalhuacan
Pingback: atizapán de zaragoza clima
Pingback: clima en chimalhuacan
Pingback: french bulldog rescue
Pingback: surrogacy mexico cost
Pingback: Lenze
Pingback: houston french bulldogs for sale
Pingback: بطاقه ايوا
Pingback: cheap video chat
Pingback: free sex chat
Pingback: free sex cams
Pingback: amateur webcams
Pingback: free sex chat
Pingback: yorkie poo breeding
Pingback: mixed breed pomeranian chihuahua
Pingback: condos on isla mujeres
Pingback: playnet app
Pingback: boat rentals cancun mexico
Pingback: dog yorkie mix
Pingback: 무료스포츠중계
Pingback: 라이브스코어
Pingback: best probiotic for french bulldogs
Pingback: blockchain
Pingback: esports domain
Pingback: designer dogs
Pingback: french bulldog
Pingback: micro french bulldog
Pingback: securecheats the finals hacks
Pingback: mw2 hacks
Pingback: securecheats eft hacks
Pingback: mw3 wallhack
Pingback: mexican candy store
Pingback: clima en chimalhuacán
Pingback: isla mujeres golf cart rental
Pingback: grey frenchies
Pingback: moped rental isla mujeres
Pingback: french bulldog puppies for sale $200
Pingback: best french bulldog breeder
Pingback: lilac frenchies
Pingback: elizabeth kerr
Pingback: french bulldog puppies for sale houston texas
Pingback: linh hoang
Pingback: french bulldogs to rescue
Pingback: alexa collins
Pingback: 늑대닷컴
Pingback: richest vietnamese in america
Pingback: 늑대닷컴
Pingback: joyce echols
Pingback: boston terrier for sale in massachusetts
Pingback: dog probiotic
Pingback: we buy french bulldogs
Pingback: mexican candy store near me
Pingback: mexican candy store near me
Pingback: mexican candy store near me
Pingback: mexican candy store near me
Pingback: french bull
Pingback: chanel dog bowls
Pingback: chanel bucket hat
Pingback: brazilian jiu jitsu in houston
Pingback: french bulldog
Pingback: french bulldog
Pingback: french bulldog
Pingback: bjj jiu jitsu magnolia texas
Pingback: bjj jiu jitsu cypress texas
Pingback: mexican candy sandia
Pingback: chamoy dulce
Pingback: mexican candy bags
Pingback: condiciones climaticas queretaro
Pingback: boston terrier french bulldog mix
Pingback: probiotics for french bulldogs
Pingback: dapoxetine buy
Pingback: nolvadexotc.com
Pingback: How To Get My Dog Papers
Pingback: Dog Papers
Pingback: Dog Papers
Pingback: How To Obtain Dog Papers
Pingback: romanviagra.com
Pingback: Dog Papers
Pingback: How To Get My Dog Papers
Pingback: Dog Registry
Pingback: Dog Registry
Pingback: Dog Registry
Pingback: Dog Registry
Pingback: Dog Registry
Pingback: Dog Papers
Pingback: Dog Papers
Pingback: Dog Registry
I think Regelung von BLDC Motoren und Synchronmaschinen TO TAKE THE STUDIO يعتبر تحميل بيري بلس <li خيارًا مثاليًا للمستخدمين الذين يبحثون عن تطبيق يوفر لهم تجربة مراهنة سلسة وممتعة. يتميز هذا التطبيق بكونه أول … هنا يأتي دور Berry Plus! هذا التطبيق المبتكر لنظام Android موجود هنا لجعل رحلة المراهنة الرياضية أكثر سلاسة وذكاءً ومتعة. سواء كنت من المراهنين …
Pingback: wix seo
Pingback: french pitbull
Pingback: golf cart rentals isla mujeres
Pingback: French Bulldog Adoption
Pingback: French Bulldog Rescue
Pingback: French Bulldog Rescue
Pingback: French Bulldog Rescue
Pingback: French Bulldog Adoption
Pingback: French Bulldog Adoption
Pingback: French Bulldog Rescue
Pingback: timolol dosage
Pingback: vidalista 40 mg reviews
Pingback: levitra dosage
Pingback: viagra for men over 60
Pingback: levitra vs kamagra
Pingback: bulldog shih tzu mix
Pingback: minnect expert
Pingback: clima tultitlán
Pingback: clima en atizapán de zaragoza
Pingback: viasuper.wordpress.com
Pingback: malegramen.wordpress.com
Pingback: ivercid 12 price
Pingback: cialsuper.wordpress.com
Pingback: grey frenchie puppy
Pingback: playnet
Pingback: brazilian jiu jitsu cypress tx
Pingback: forum.hcpforum.com/avana
Pingback: antibiotic drops for eyes
Pingback: vigrakrs.com
Pingback: rent a golf cart
Pingback: French Bulldog For Sale
Pingback: French Bulldog For Sale
Pingback: Frenchie Puppies
Pingback: French Bulldog Puppies Near Me
Pingback: Frenchie Puppies
Pingback: French Bulldog For Sale
Nowadays, most of the devices that help make life easier and
comfortable—things like washing machines, refrigerators, fans,
air conditioners, power tools, blenders—require motion control.
All of these devices consume energy to produce motion. The
way this energy is efficiently used depends on the control
systems, electric machine design, control algorithms, etc. One
of the biggest challenges that we face as a human race is the
efficient use of energy and most of the efforts to improve this
challenge are targeted at motion control systems. Hence,
many energy-saving advances are coming from improved
motor control techniques, frame design, materials and
manufacturing precision.
More efficient control techniques were developed years ago,
but the required CPUs to perform such complex algorithms and
computations were too expensive for cost-sensitive markets
like the appliance market. This situation has changed in recent
years; high-performance digital signal controllers have been
developed at lower costs with all the required features to
perform these complex control algorithms.
Another area where energy-saving advances are being
developed is power conversion. Power conversion systems
are used to convert electric power from one form to another.
During this process a certain amount of energy is lost due to
the inherent power consumption of the system, efficiency of the
topologies, the control techniques and the electronic devices
used. Most of the power conversion controls are performed by
analog circuitry, but the requirements, of the new energy-saving
regulations have increased and frequently have become harder
to meet with analog control systems.
The use of microcontrollers (MCU) and DSCs has opened
new frontiers in this regard. Today, it is feasible to achieve
98-percent efficiency in power conversion systems through the
use of digital control techniques and complex mathematical
computations executed by high-performance low-cost digital
signal controllers.
Motion Control Design Challenges
Several kinds of motors are used in motion control, including
brushless DC motors (BLDC), brush-commutator permanent
magnet DC motors, linear motors and stepper motors.
System engineers must not only choose the right kind of
motor for the mechanical task, but they must also choose the
appropriate control loop scheme for encompassing both the
mechanical and electrical time-variant responses of the system.
Tuning this control loop is often done in the design stage of the
drive electronics.
Developers face a number of design variables because each
type of motor has a unique set of requirements for the drive
electronics. Designing drive electronics is further complicated
by the electric motors themselves, which, by their inductive
nature, are prone to producing electromagnetic interference
(EMI), radio frequency interference (RFI) and destructive
high-energy transients. Drive electronics design must prevent
EMI and RFI, while still withstanding transient over-voltage and
over-current conditions.
BLDC motors are very popular for many applications. A BLDC
motor does not have a commutator and is more reliable than
a DC motor. A BLDC motor has other advantages over an AC
induction motor. BLDC motors achieve higher efficiency by
generating the rotor magnetic flux with rotor magnets. They
are used in high-end home appliances (such as refrigerators,
washing machines and dishwashers), high-end pumps, fans and
other devices that require high reliability and efficiency.
BLDC motors are widely used in pump, fan and compressor
applications because of their robust structure. A common
feature of these applications is that they do not require position
information; only speed information is required, and only to
perform control. BLDC motors can be used without complex
control algorithms.
In the BLDC motor, the rotor position must be known to
energize the phase pair and control the phase voltage.
If sensors are used to detect rotor position, then sensed
information must be transferred to a control unit.
https://a-quran.com/member.php?u=12941
http://www.ascona-board.de/thread.php?postid=158191#post158191
http://eurotrucksimulator.phorum.pl/viewtopic.php?p=1349856#1349856
https://wrkz.work/thread-443018-post-539562.html#pid539562
https://arounduniversity.lpru.ac.th/index.php/topic,11709.msg350282.html#msg350282
https://tienda.laordendeayala.com/boards/topic/67665/quer-compre-tadapox-encomendar-tadapox-entrega-durante-a-noite#1283853
https://forum.simplestore.ro/viewtopic.php?p=9941#p9941
https://www.alaa-anz.org/group/mysite-200-group/discussion/776f1553-1f28-4ac7-afc1-d750d1631c05?commentId=f8659927-93d3-4583-a166-8a1a6c8df5e4
https://www.pirsumdrushim.com/group/mysite-231-group/discussion/8cdde269-5bae-4258-a9c0-482a7b9850a7?commentId=6b37b299-50fe-4e87-b969-a7a113995380
https://forum.bandariklan.com/showthread.php?tid=577878&pid=1208650#pid1208650
https://gamer-avenue.net/viewtopic.php?p=921655#p921655
https://forum.programosy.pl/viewtopic.php?f=1&t=350550&p=1320900#p1320900
http://theinferno.awardspace.us/index.php?topic=2934.0
http://web573.webbox110.server-home.org/phpbb3/phpbb3/phpBB3/viewtopic.php?f=1&t=121740&p=948668#p948668
https://gratisforums.com/rainyday/viewtopic.php?p=1202#1202
http://www.izolacniskla.cz/forum-detail.php?dt_id=54660
https://1abakan.ru/forum/showthread-366523/page-1/
https://www.deep.su/forum/viewtopic.php?f=2&t=14005&p=273444#p273444
https://ewave.tv/forums/topic/4932/jardiance-10mg-and-25-mg-price-benefits/view/post_id/120603
https://www.milliescentedrocks.com/board/board_topic/2189097/6772585.htm?page=1
https://lumigo.fr/lumiweb-forum-webmarketing/Thread-leg%C3%A1lny-a-registrovan%C3%BD-vodi%C4%8Dsk%C3%BD-preukaz-v-priebehu-nieko%C4%BEk%C3%BDch-dni?pid=20306#pid20306
https://www.glufke.net/oracle/viewtopic.php?p=43545#p43545
https://developers.thethings.io/discuss/68127ba47a42f0001ecf7a92
https://swiatkarpia.com/forum/discussion/what-surprised-me-about-clean-factory
https://www.saltlakeladyrebels.com/group/mysite-231-group/discussion/72f2f834-7c33-4ea3-acd1-e44551c35dc7?commentId=98733c57-e45c-4535-856b-ca60e0b1c0cb
https://www.thepetservicesweb.com/board/board_topic/2701171/6812727.htm?page=1
https://www.as-tu-vu.com/forum/viewtopic.php?p=878873#878873
http://www.laptoptestovi.com/forum/laptop-hardver/potential-future-anime-collaborations-for-diablo-4/msg46016/#msg46016
https://www.sunemall.com/board/board_topic/8431232/6812452.htm?page=1
https://www.iyfusa.org/group/iyfusa-group/discussion/26fc519c-5e8e-4bed-90c4-036c7fa79f3e?commentId=94b34e20-9620-4e23-9ca1-8c529899a8e1
https://itkr.com.ua/forum/viewtopic.php?p=280015#p280015
https://tinachancey.com/forums/topic/need-safe-place-to-gamble/#post-144995
https://www.live4cup.com/f-s212187-.html#p1325167
https://giare24h.net/re-blackjack-pragmatic-play-tro-choi-dinh–022825734.html?t=183938
https://discuss.web3.university/thread/what-role-does-accessibility-play-in-modern-website-design-59464
https://www.normanfenton.com/group/norman-fenton-group/discussion/0e7f2268-d45e-4d39-a55c-3a8fce89ea7c?commentId=83ec24b7-2f9f-4a17-b1b0-778b878f1d0a
https://forum.mbprinteddroids.com/showthread.php?tid=59479&pid=123604#pid123604
https://www.newdirectionchildcarefacility.com/group/mysite-231-group/discussion/56e8828d-c7f2-4621-9a5f-5fbb5efc8808?commentId=af361bb8-e36f-4299-be35-3f6219463118
https://www.merlinmoney.com/group/mysite-231-group/discussion/c72f3a27-4958-4b90-bf5c-42a0cf6609a1?commentId=5ebe3fc4-4fa6-4313-a8f1-b15873223b00
https://drsridharias.com/forums/discussion/history/is-fmwhatsapp-apk-safe-to-use
https://forum.immortales-gilde.de/viewtopic.php?f=2&t=243753&p=599994#p599994
https://la-grande-armee-rp.la-mwette.fr/viewtopic.php?f=30&t=1357&p=10875#p10875
https://fpgeeks.com/forum/showthread.php/45460-How-does-business-ownership-provide-personal-growth?p=444080&posted=1#post444080
https://www.laketahoemarathon.com/group/the-tahoe-triple-marathon-3-x-26-2-group/discussion/58c95d16-195e-4f93-a32d-52209dfa2757?commentId=7f658ae5-c2f2-42d1-bb80-e7c49cbd2967
https://www.et-alors.net/forum/viewtopic.php?p=1207086#p1207086
https://forums.cyclone-hosting.net/showthread.php?tid=16555&pid=22555#pid22555
https://koreaweeklyfl.com/news/viewtopic.php?p=353955#353955
https://bitcoinviagraforum.com/showthread.php?tid=204431&pid=331922#pid331922
https://toronado.org/forum/viewtopic.php?f=20&t=617615&p=644943#p644943
http://collie.fatbb.ru/viewtopic.php?f=18&t=6638&p=19147#p19147
https://www.lbinstruction.com/group/lbi-swarm/discussion/8816e711-5c51-4493-b2fd-00401b0127f7?commentId=5945c802-4369-45f1-bc71-826c410209d0
https://www.neuroenergeticschiro.com/group/mysite-200-group/discussion/93ab4257-84f1-4ceb-ad4a-d0a864880bb8?commentId=28614ca6-0e0e-40a6-80c0-b5bfb7b43d03
https://www.angiesbookseries.com/group/mysite-200-group/discussion/7df29e35-ff03-4d6f-8948-10688e475968?commentId=f7a22c23-c84f-49ac-934e-a6c5bf0e4297
https://www.kolourfulpaints.com/group/mysite-200-group/discussion/a0f44477-afcc-4362-8a30-625d7e0b17e0?commentId=81858c9e-8f77-40b9-b2fc-606b52715197
https://www.propertynook.com/group/propertynook-group/discussion/1d800c9a-d11b-42d5-a3d8-e754d3b68a4f?commentId=352f9fd0-035d-4c3f-8cbc-8c3778a99a77
https://www.nftotc.net/thread-21495-1-1.html
https://www.1percent-club.com/group/mysite-200-group/discussion/354976f1-85b8-48f8-981e-d84bbac8f8d7?commentId=1467eb23-aeff-44ab-8c91-09f04cc2e527
https://www.brightmindskidszone.com/group/meals-nutrition/discussion/ef4264fd-8f59-40aa-b053-07cc5eae2930?commentId=efa46f8c-9882-4240-a9ed-82d05c585266
https://www.fgvamerica.com/group/fgv-america-inc-group/discussion/5b685670-35fb-43ec-a331-4b9e75bae943?commentId=5a54b0ad-d813-4e1d-ad85-5265e16712d6
https://www.brightmindskidszone.com/group/meals-nutrition/discussion/5b06f37f-d908-4974-85e3-f6c4c6b06661?commentId=c62eb347-a698-4811-95c1-4761e5de2baf
https://www.purposefulmaths.com/group/mysite-200-group/discussion/89ba642a-c604-4ecd-baf5-22f49ccd5b0e?commentId=5efef369-9395-4bf2-9b64-defae69907a4
https://www.trivek-architects.com/group/trivek-architects-group/discussion/ca1bdf39-07e7-446e-b922-e1fb61c6396b?commentId=1864c0d4-7698-4bd6-afcb-d47bc83631c6
https://www.risingvoicesoxford.com/group/mysite-200-group/discussion/a6e4c4ea-68b5-4ad0-aded-5a93f4eb7a88?commentId=b3a6b382-8744-4d45-b572-a2df50aa8587
https://www.reydegloriapln.com/group/reydegloriaparalasna-group/discussion/b60f4559-49dc-4e24-88d2-d0d05372e418?commentId=a2353bf3-eee9-46ba-973e-45c9a310c7d5
https://www.siddhilanka-srilanka.com/group/mysitegurupu/discussion/7653b13a-f0a0-4990-a530-9585bed593d6?commentId=a19e1496-b39e-4e1a-80c8-b5974799d3f5
https://www.thewrapsheet.com/group/mysite-200-group/discussion/2015ccfd-360f-4a52-8166-34fae05b4e6d?commentId=b92c65b3-b332-4413-b484-576c39317eeb
https://www.maryssafehaven.org/group/mysite-200-group/discussion/497cc5b4-b2c2-4dc9-8755-d3afc9587606?commentId=163186e0-755e-4152-98fd-51ff7ae9edda
https://www.profbarajas.com/group/leticia-barajas-group/discussion/bdb3074a-46df-4e9d-a460-c92873482d11?commentId=749faa45-404a-45e1-a371-4cfa8232a749
https://www.scholarsprep.org/group/scholarsprep-academy-group/discussion/c6f90faf-0b42-4a72-bad0-1141b01c4a20?commentId=d8a669e2-0a6d-4079-b08e-8617cc1cd95f
https://www.csraspringfootballleagueinc.com/group/mysite-200-group/discussion/341912f8-07ee-48ce-b6c6-a6f48e35a9fb?commentId=e35ee854-9c9e-422c-ad30-d81aeb9cc0d0
https://www.enbfitness.co.uk/group/enb-fitness-group/discussion/b152a4e9-7ec4-48de-90aa-fef2eacceb51?commentId=c411503e-8e00-4fb0-97f3-c105c1c57b35
https://www.centrovidaupci.org/group/mysite-231-group/discussion/a84811ce-63c2-433d-a3cf-1ff3f4d2dcf0?commentId=1a53cb1b-9922-4b97-8a7a-291f3f2977d5
https://www.djaron.biz/group/mysite-231-group/discussion/1c597e7a-4f66-4201-84ae-1acc4f327171?commentId=50e48759-ae0f-4723-b0b8-fdf9aa7ab6f6
https://www.enriqueswebsite.com/group/mysite-200-group/discussion/07d0123c-3d59-4d50-9297-57d31cdb3bb9?commentId=bbaf7819-b1a5-478f-bbda-eb6f2745d10b
https://www.graniteforestdojo.org/group/novice-karate-group-ages-8-up/discussion/27f79395-1d62-4831-84fc-424779c467c4?commentId=9d51563a-0b58-4513-9354-f5349a5abb28
https://www.cifre-villedeparis.fr/group/groupe-de-cifre/discussion/de89d25f-2c8b-461a-9890-ad7455f3f4fb?commentId=0d301435-c419-4cd9-a24c-1d795016ab70
https://www.dogwithnochill.com/group/mysite-231-group/discussion/93f42074-7dc9-4585-a7f6-028575659747?commentId=4206f2b9-451a-4297-b67d-79a255953ea8
https://www.flapack.co.kr/group/flapack-saiteu-geulub/discussion/ddc1ae65-972e-4fca-9614-751afab9d40c?commentId=5e38639e-361d-4099-9af8-6c68031a07c6
https://www.coachnicdc.com/group/coach-nic-group/discussion/a8890b56-c5ef-4323-934c-59295c1b09b2?commentId=1c892d11-7136-47f7-ba01-a47906d45525
https://www.dreambecare.com/group/my-site-group/discussion/5fa0aaeb-1d49-4fce-9f38-f288a9fc20fd?commentId=14858501-82fa-44da-a504-0a1e04228e00
https://www.gayraccoonart.com/group/gay-raccoon-art-group/discussion/ebf2f036-d7b8-4edf-99cb-f52d09653b45?commentId=42e71ecc-5497-4f5e-80bf-1c29cfd487ec
https://www.gyosei1928.com/group/mysite-231-group/discussion/a505215e-539a-48e7-a856-df9966641859?commentId=bf63b2f7-8f3f-4d84-934d-4a25d2debb5b
https://www.mchildreth.com/group/mc-sweat-community/discussion/699edc49-9090-4b1b-8789-caf3c98f1cfb?commentId=d6ff6cdb-90d9-4e99-9aeb-fe93974c3042
https://www.containerutleiebergen.com/group/mysite-200-group/discussion/5562bfc6-be4d-4935-a090-cdc9a85f998d?commentId=1c733a60-f7e2-4565-ad49-5e45d22b8f29
https://www.durhamctdemocrats.org/group/durhamctdemocrats-group/discussion/bda00e5f-ad50-438c-ae5a-fdb2f6ed0fb0?commentId=7d8c3746-6dc4-400e-af65-b4b8093186d8
https://www.glowunlimbited.org/group/mysite-200-group/discussion/3e89cdfa-351c-4276-89fa-4a153feccec2?commentId=d925c330-3ac3-4493-87f6-eea61e0cc047
https://www.downhomebiblechurch.org/group/mysite-231-group/discussion/b5efe0dc-c46f-4c0b-ad7a-72250144872f?commentId=16646166-a659-4f35-8435-585fbce88882
https://www.quavosstellarstrands.com/group/quavos-stellar-stra-group/discussion/f95b58fd-f079-4a73-8041-123cf34eca24?commentId=954b4cfe-c049-4e71-b5c6-a02e9247c695
https://www.beckasbeauty.co.uk/group/beckasbeauty-group/discussion/ecc06d4e-c5be-4a40-ac7d-4c8235acd2e6?commentId=68946846-9ffd-4f64-8526-6b095a79a56e
https://www.proactivethinkers.org/group/after-school-activities/discussion/b31ded72-b50f-426e-b45a-a82c820f6aac?commentId=a1645fe3-5ded-45fc-88b9-58688bd5aac8
https://www.soultemple.online/group/mysite-200-group/discussion/3774cf54-0b9e-443a-acac-9d3e6685ae65?commentId=0dc420e4-eb5d-4ac3-bcd0-7a130a66a6bc
https://www.oneofakindmouthpaintings.com/group/mysite-200-group/discussion/6cbde2d0-cdb2-48a0-8c14-66e97af03b6f?commentId=2f901b43-0acf-4077-bf83-7e4262846ade
https://colorpop.ninja-song.net/forum/viewtopic.php?p=289335#p289335
https://www.christinefrechardgallery.com/group/christine-frechard-g-group/discussion/bc36b984-2d28-4336-b9c8-5d80e3ed4184?commentId=1f43acbc-637f-446d-9634-a880784418ec
https://www.latinverge.com/forums/topic/9017/-/view/post_id/101879
https://www.yourmoneymattersmentoring.org/group/your-money-matters-group/discussion/fccf2652-9e25-4740-a2b9-a8ad5d8c2066?commentId=41436152-8a4e-4ff3-8d11-16d63d76a101
https://www.stepfamilynetwork.com/group/stepfamily-network-group/discussion/24af3e5b-0efe-4e67-9e65-1d3714dab37b?commentId=26d8c969-5e56-407c-9055-cb9a749e42ac
https://www.minorstudy.in/group/mysite-200-group/discussion/380e6b2a-03d9-4326-9f4c-c7b07990fa8b?commentId=c0f77a87-2755-4d5e-a92c-3978861bd61a
https://www.arttowear.ca/group/december-annual-holiday-party-2022-group/discussion/69e1dbf7-d71c-4060-95ca-08d0398230f1?commentId=a36e3f16-008d-4524-8b02-c8542676e164
https://www.deepstateconsciousness.com/group/mysite-200-group/discussion/708fc8ff-9699-4d75-b9ce-176125bb0ba5?commentId=83687ae3-b3d5-4d40-bcf8-fa2102814bf2
https://h2kclan.co/forum/index.php?topic=162844.msg367938#msg367938
https://portal.woellmarine.com/thread-174795-post-308414.html#pid308414
https://whoosmind.com/forums/thread/14803/
https://foro.muelendhir.com/showthread.php?tid=120999&pid=304558#pid304558
https://zapp.red/myforum/topic/brighten-your-space-with-custom-neon-signs-in-india/#postid-190242
https://www.bearhugcattlecompany.org/group/mysite-200-group/discussion/945a064e-4bdb-4b44-9d94-d7cb9ada3108?commentId=4bf02ad7-7cc5-436d-a687-ca38de9dfb48
https://www.alphachurch.org/group/bible-thoughts/discussion/c0cb9d65-d8de-4572-900c-3396c0dd4b29?commentId=74f9c212-303e-4bf5-b4bc-836d38853e86
https://www.crossfitquispamsis.com/group/mysite-231-group/discussion/97effb1e-aac8-4191-b03f-3422c31877fd?commentId=e8c6cbdf-c7bf-4c67-a68c-3092c6295f7b
https://www.latinverge.com/forums/topic/9017/-/view/post_id/101879
https://www.worldstutteringnetwork.net/group/mysite-200-group/discussion/97fbc1d3-8d37-4879-aef8-b1d38bae41ec?commentId=572112df-d50a-49d7-a915-2fb83f900a24
https://www.empirecityusa.com/phpBB3/viewtopic.php?p=851419#p851419
https://www.botellasenelmar.com/group/mysite-200-group/discussion/3aaca60c-55e8-4eee-b08e-94a110b35012?commentId=16dd2644-3004-4fd6-a575-5ab73975ac7d
https://www.fontainebleau-sport-sante.org/group/le-public/discussion/74dcbf14-c3c7-4b54-aa2d-a6fcf691e72d?commentId=fc337fd9-0101-4875-a78d-7fb43beb5ff3
https://www.brightmindskidszone.com/group/meals-nutrition/discussion/ef4264fd-8f59-40aa-b053-07cc5eae2930?commentId=efa46f8c-9882-4240-a9ed-82d05c585266
https://www.empwrmba.com/group/deloitte-interest-group/discussion/d1e9843a-2e20-49c6-a9a7-c960093ed7a2?commentId=f3efbd11-386c-4ad0-89ee-60ac75611679
https://forumforex.id/forum/forumforexid/rule-informasi/178655-intuit-24×7-qb-line-why-can%E2%80%99t-i-edit-invoices-in-quickbooks-premier-support
https://takebackbaltimore.net/smf/index.php?topic=32441.msg328075#msg328075
https://uokana.net/mybb/showthread.php?tid=27551&pid=1812759#pid1812759
https://www.sacredheartbattersea.com/group/altar-servers/discussion/8b9fc030-d700-40c0-b420-95863e2084b6?commentId=a96984a6-62fe-4c23-87fb-3c41fd8c045a
https://the-smallerboard.net/index.php?topic=221023.msg262620#msg262620
https://www.realtyquant.com/group/realtyquant-group/discussion/de4323f8-2678-4a28-ba04-a9f7f02dc607?commentId=bc3cd873-98fa-40fd-acd9-d7450c51634f
https://online.rqmtutorial.com/groups/forums/forum/discussions/engaging-fans-worldwide-spurs-fun88-extend-agreement/
https://www.uaacademy.org/group/bloomfield-village-pizza-group/discussion/d4d9cac1-6152-460c-826f-64e2476cbb88?commentId=48122356-1dce-462d-afee-4cd071bd4e45
https://www.ishan13.com/group/ishan13-qun-zu/discussion/db623b1c-cae4-4fe5-9976-18a37cb6e123?commentId=29e3fd51-7bd7-4e19-bfb0-72a48dd8316e
https://gignaja.com/index.php?topic=166862.new#new
https://www.beaglerescuenetwork.org/group/mysite-231-group/discussion/739dd6a3-a046-4534-b458-932d1c2ae5e4?commentId=55b6192e-748b-49e6-b308-5ef33307e145
https://www.weldingandstuff.net/group/mysite-group/discussion/601342b9-6017-4ae2-8735-a5d8ef437871?commentId=adedf5d2-b6c7-4184-a8b4-559bef0565ad
https://www.electronicsforboats.com/group/hampton-navigation-group/discussion/a87d6f03-e2ae-4de0-a1d5-c8e128c511a8?commentId=27cc2354-7386-419a-b7d1-96077b278fb3
https://www.tacticalk9sdogtraining.com/group/mysite-200-group/discussion/a09aa89e-6c89-4953-b593-8a22aa5863f4?commentId=4230e6bd-2387-4080-9239-82192f974668
https://www.level-21destinationevents.com/group/destination-golf-tournament-copa-de-golf-melia-cuba-group/discussion/2334ed34-5d83-4f7b-b3b8-24587b9406b6?commentId=751ab005-2a91-44b2-be69-73ccb96c2412
https://www.embodylove.shop/group/kiss-and-tell-paint-and-sip-group/discussion/93aec1e8-ea1b-4893-98b0-8e72246ba090?commentId=79992e22-bc31-4c1f-a5a3-63ee4ab707fc
https://www.samshaircompany.com/group/sams-hair-company-group/discussion/731deb2e-1ae1-4cd7-a390-9c03fa2a8953?commentId=a2292580-7d17-4119-88b7-e5019763182f
https://www.bankakingdom.net/group/bankakingdom-group/discussion/83419b7d-26cc-4416-bd58-1e147e10dc9c?commentId=4c438874-28f9-4c57-85f5-cb0bdd36f82c
https://www.swstore.co.uk/group/sams-wills-ltd-group/discussion/60f220f8-daca-4092-a6aa-85cf0d052afd?commentId=116ce39f-ec6a-43ce-b036-451fec005735
https://www.gemsaaqstudents.com/group/students-parents-teachers/discussion/dc1a1f20-3f8d-4595-b990-4e3e4a35d8fe?commentId=c12c8552-4de3-4863-b9ee-1ee45e7e2717
https://www.joliscollies.com/group/mysite-200-group/discussion/1e764279-ea8b-4671-b5fb-4c79c23ebd5c?commentId=41b6efcf-25c1-4bf6-bead-2c5756fcd6dc
https://www.bardwareoffroglane.com/group/bardware-of-frog-lan-group/discussion/a23a9646-5308-47ce-a7dd-9e5e631b4349?commentId=b62817ed-f8a2-49cc-9c81-1c3b89f76fdb
https://www.rarapetcare.com/group/rarapetcare-group/discussion/26b205ae-a3be-42ab-a774-5f82fda76e75?commentId=7128ad9e-f50f-4709-be4d-13458195b9dc
https://www.revealintl.com/group/my-site-group/discussion/12d7582b-929f-48a6-811f-65b6545aec07?commentId=d3778bf8-8ad5-41c3-994d-cfe341b0e3dc
https://www.cedargrove.jp/group/mysite-200-group/discussion/57d6add9-5149-472f-9385-3fde949b7b97?commentId=ec1930c8-2aaa-463d-8544-57697adf4871
https://www.madglassmob.com/group/mad-glass-mob/discussion/991325a8-76d5-4e63-be2f-536467ce28a1?commentId=bef706dd-6549-4844-8f46-6282f7e94e7f
http://hertha03-fz2.de/phpBB3/viewtopic.php?f=9&t=170693&p=281676&sid=41a6ba1fa0b3d31863ae68dee9bd6042#p281676
https://painpilot.co.uk/forum/showthread.php?tid=27172&pid=58760#pid58760
https://forum.eliteshost.com/showthread.php?tid=26168&pid=39174#pid39174
https://www.holzhama-methode.at/group/mysite-231-group/discussion/30d63768-fb9f-4888-b354-2e489c0b248f?commentId=e9012200-e376-4c6d-8346-ee3e884adeb1
https://dorminantus.de/thread-457093-post-1349853.html#pid1349853
https://www.amplifycayman.com/group/amplify-cayman-community-group/discussion/2b8c545e-f240-4475-94e0-ed9a6ab9be8e?commentId=8814127b-486c-4ab8-a950-9d3bea39af1b
https://www.lovvelactation.biz/group/mysite-231-group/discussion/23c48cba-a57e-45c8-a6dd-98facde20c2b?commentId=aee0e3b2-ac08-40a7-b7ea-5cdd63b6af0f
https://thfmu.com/forum/topic/myths-about-replica-rolex-watches/#postid-35558
https://www.unfortunates.org/group/mysite-group/discussion/13c1c6a5-838e-4116-a723-8804b6ac4f94?commentId=d3f85cf1-b27b-47e9-ba17-5bad82257d74
https://www.thisweekinguadalajara.com/group/twigs-immersive-experience-dia-de-los-muertos/discussion/41928010-31fe-4ec4-885a-c9af3fb4fa83?commentId=fbac744d-fad9-4a91-b44c-1a91e7663262
https://www.gracecharityfoundation.com/group/mysite-200-group/discussion/7cb1671b-fcfe-428f-a8b6-05184de93a96?commentId=746c6d71-09bd-40c7-9aed-dbc48f470e6f
https://www.habroofing.com/group/roofer-leamingtonspa-group/discussion/aa453e02-f992-4a07-9233-fdb98c8c5190?commentId=839eb2d4-c013-4575-a3f9-e45f81bcf252
https://www.unitedhopesda.org/group/working-mothers/discussion/172628be-0cc1-4de5-8f28-cfc9e1964ceb?commentId=3f437741-8c23-4b3b-9c64-bf619adeb7ab
https://www.hungariansv.com/group/mysite-200-group/discussion/dfa19f55-7ed3-434e-9f21-3618beeab93f?commentId=fa5740c8-7acd-43fe-a3ae-05461ecf1602
https://www.catpantscorner.com/group/mysite-200-group/discussion/27570a48-9582-4344-89ac-32e5276372f5?commentId=0dc23cb0-01a6-4653-80fa-ea9398075c6a
https://www.navigatortek.com/group/mysite-200-group/discussion/e73f1a96-687b-44ca-8423-0b0787baa191?commentId=2e9f834e-61c3-4f93-abe6-d93e26730f14
https://www.quanchau.com/group/office-management-team/discussion/2485055e-0246-4847-af75-784912a0993a?commentId=7aaf4f44-9145-4fc7-afa0-2a8ae5798bae
https://www.upcycledpapers.com/group/mysite-231-group/discussion/777b1111-1a8c-4563-9c2d-ca5856b3925c?commentId=e28f11ac-cfd5-4123-926c-5a4cd9b615cf
https://www.irondpc.com/group/mysite-231-group/discussion/4de99cd2-5153-4404-9189-b17ec8ee06a3?commentId=54c1b583-b171-4cfd-8bf4-632097fa50ac
https://www.misendero.org/group/mysite-231-group/discussion/e21b4c0b-8336-473e-aa09-9d41831362b0?commentId=4e0e4bfd-5ce5-44b9-bba5-21bd013bf4ba
https://www.fretesarts.com/group/groupe-de-levenement-vernissage-chemin-land-art-2022/discussion/085b7437-9bb5-48c8-b93a-3a1e53baa2ff?commentId=d1fdcf50-502f-4d56-a9e7-264e6e926fda
http://forum.vorchun.ru/viewtopic.php?f=2&t=160999&p=442930#p442930
https://www.mircalemi.net/showthread.php?tid=202439&pid=449760#pid449760
https://onpoint-esports.org/index.php?site=forum_topic&topic=8933&page=1
https://forum.trrxitte.com/index.php?topic=18405.msg409951#msg409951
http://forum.wowtcg.free.fr/viewtopic.php?f=3&t=2925&p=152814#p152814
https://www.babiesandsleep.com/group/mysite-group/discussion/28dd70c5-0cee-41a2-bc93-fcff995aaa21?commentId=4a9e1eed-3738-438d-90dc-726c26ef1e45
https://www.carnetsdescalade.ch/group/prepa-rando-hivernale-vendredi-9-decembre/discussion/95ef0890-dab5-4a8f-b10c-bee3ba23f2bd?commentId=b5e86a37-3010-4044-a86a-ac6ee52f22c5
https://www.pethomeboarding.dog/group/mysite-200-group/discussion/f48b7057-b751-40ca-9a4d-1eeb86a349fc?commentId=806a7f33-9a01-4952-9c4b-14e829d4f117
https://www.vibrancebymita.com/group/mysite-200-group/discussion/edd5f443-61db-4b14-8ab8-96a11f4f1004?commentId=d67c0406-078b-4d85-8c7d-35691f2b6174
https://www.pro-concept-enterprises.com/group/mysite-231-group/discussion/09b2ec78-a526-455e-85da-27b11b7f72d7?commentId=caeb1fb0-d76a-412b-8c19-54dd8472b161
https://www.musicaltheatrevirtual.com/group/mtvirtual-group/discussion/29592185-bd28-42ff-896e-9d713e355401?commentId=289bb8f8-3ad9-445f-b39e-e79d92a59d08
https://www.rainbowbeautystores.com/group/mysite-200-group/discussion/19144866-9f86-41d5-8c70-05e7935d4b8e?commentId=3be91e67-68af-498a-a69b-ab90dadf5cd1
https://www.imudesigns.com/group/mysite-231-group/discussion/b03e78fb-8b13-44f2-af1b-3deaf34a53d5?commentId=823890d9-f42a-4b2b-826d-162fe69f4a1e
https://www.meadowlandsigns.com/group/mysite-200-group/discussion/bdebdb48-a0f4-4981-92ab-5c6a0a090792?commentId=8066fa6d-38cf-474d-ac92-b2bcf69cc470
https://www.gsvsevakendra.com/group/mysite-200-group/discussion/6420cd77-36a5-4119-8bba-3c7daa65044f?commentId=20aa328d-5d22-4731-8b21-825c4eac84c0
http://jorakhesamphan.go.th/site/index.php?option=com_ccboard&view=postlist&forum=1&topic=989&Itemid=59
https://www.brapus.com/group/mysite-231-group/discussion/9e31610d-2ec0-4376-a866-5b9d161e175d?commentId=6a39bffa-d7b1-4b16-a9b1-55c33379d67f
https://www.tmfsa.org/group/my-journey-as-a-coda-family-counselor-group/discussion/13f9c759-5d25-4959-841f-93e72fd5bb55?commentId=32d0f76a-3f69-4575-aeaa-5a90638d4afc
https://www.cienergiebaladifitness.info/group/mysite-231-group/discussion/42e20916-3cde-4bb4-90fe-f8e33081cf8c?commentId=ccd38e5d-4440-4968-b143-90666e29272b
https://www.centroelcastano.cl/group/mysite-200-group/discussion/c70cd1d5-09eb-42c3-8b4b-bdf6979b79b1?commentId=4d8fee25-7c59-4019-9540-ea31b714f687
https://www.miseducationofmotherhood.com/group/m-o-ms-annual-brunch-group/discussion/f6df47f7-e341-4d25-a711-ef47bd945144?commentId=cb582324-74c4-4f29-8364-13872dedf266
https://www.pdpatx.org/group/mysite-231-group/discussion/a0fbbc40-2392-4726-9bbc-4e95f9eb174f?commentId=49fa30d2-076b-4f10-9c4c-2d9e7caa1c57
https://www.tone-cafe.com/group/tone-cafe-group/discussion/9ec69332-653e-4cd9-9877-a48aee891943?commentId=935e3ca7-b0ab-4cdd-a14b-86f58aeadf12
https://www.theafrikanpoetrytheatre.org/group/2022-film-educational-workshops-group/discussion/03098558-c479-4a64-8ff9-4a6cb7815896?commentId=bc09798e-5eb9-437c-9995-cfae89a4d756
https://beatfoundation.com/phpBB3/viewtopic.php?f=4&t=88740&p=387779#p387779
https://tsxvresearch.com/forum/viewtopic.php?p=1603783#p1603783
https://www.workwiththrive.com/group/evelyn-educates-group/discussion/ed3a972a-1c05-4f78-a2d5-8783e9230389?commentId=c4e5e272-506c-498b-b3b5-62bfa4292700
https://www.christios.com/group/meals-nutrition/discussion/7b67dcfd-586a-4737-ab31-02bff6f7d884?commentId=2914c5bb-cad5-4cb9-b5ea-362a295945d7
https://www.allcityjazzmissoula.com/group/mysite-231-group/discussion/50889fc8-2cca-4684-a0ff-44660328af7d?commentId=6d61039c-dfe1-41cb-a4d2-d9ca2836f172
https://www.lrhspride.com/group/leesvilleroad-group/discussion/512d547d-5685-4b8a-8f47-1728bf911fc9?commentId=b8e306d8-8e33-41d1-97d4-757f0facd91d
https://www.latinossostenibles.com/group/mysite-200-group/discussion/875cb835-0cad-4ec9-9478-5f85149bbd9f?commentId=b5b40787-d3e6-49c1-a910-616529f42fd3
https://www.squadskates.com/group/mysite-231-group/discussion/d83f0417-cbbe-45ba-a910-90049eb504df?commentId=050234b8-10f7-4325-bba1-3908ab02edad
https://www.beatcomms.com/group/beatcomms-saiteu-geulub/discussion/e6f671ca-fa02-40ff-be99-656d7e7e7fb8?commentId=8013b32a-46c8-48d9-8666-f5371373d503
https://www.primeiroatoteatroempresa.com/group/grupo-teatroempresa-sipat/discussion/1ef1763e-d5ef-4bd8-b1e5-229ca0056af8?commentId=4d9a1911-8059-4f5e-bd67-2680bc46effe
https://www.dibonacomemorials.com/group/dibonacomemorials-group/discussion/b92f4231-f844-4320-b4d5-e44f8ccc19dc?commentId=59c0ebaf-3a83-4b2d-8273-72364ffe804e
https://www.comicforcancer.org/group/mysite-200-group/discussion/d8bc2a8c-b89d-40f7-b3b7-e465ddbaf9df?commentId=27046075-659b-4ba8-9319-ecc427627df9
https://www.peps-tech.com/group/peps-tech-group/discussion/d4dd2981-5f25-444b-ba68-7e1d837c92f2?commentId=778a1155-58bb-410a-8f81-f4ab57cbadfe
https://www.floatmyboat.ch/group/mysite-231-group/discussion/2bd1b9d1-3e4c-4fcb-b0e3-05894ffc66fa?commentId=0619bcff-2c1d-44a7-9287-903f38447031
https://www.makeamove.be/group/move-groepspraktijk-groep/discussion/4bd29440-492a-458a-b174-d60cd4e6f3f5?commentId=caae3f09-3429-4fb0-9771-eef524f8c8bb
https://www.closetedstance.org/group/lets-add-some-pride-in-this-pride-month-group/discussion/43df4142-63fc-4c4f-aa41-567800b9077f?commentId=ac212c13-f223-46ba-a3ae-028cd08ffc2b#google_vignette
https://www.enmarcacionessiena.com/group/mysite-200-group/discussion/6045e505-de41-49e3-8302-e62d63ec5fd7?commentId=71b826f0-983b-4634-99fd-b5b5ac78bdbe
https://www.citydanceny.org/group/mysite-231-group/discussion/d39b315a-94b5-4bab-8de4-4899e9f80dc0?commentId=57d81067-db13-4d6c-b6d6-fd61b0f72a10
https://seha2all.com/events/topic/view/event_id/5/topic_id/3229/post_id/3997
https://forum.community-mu.com/showthread.php?tid=57133&pid=88665#pid88665
https://www.crimsonmoon.com.au/group/crimson-moon-group/discussion/63a7fb8b-71c5-4ce6-b2e5-2bb4099bd67e?commentId=e214e963-efa5-4435-9310-3089773a7f3f
https://www.coffeesix-store.com/board/board_topic/7560063/6802400.htm?page=1
https://www.musichalldesign.com/group/mysite-200-group/discussion/27eae695-3d66-4780-a495-3e5797a2bbf8?commentId=e734e172-73e1-41a6-af5a-cb651a96257d
https://www.swancygroup.com/group/theswancygroup-group/discussion/22103dca-d977-483c-9545-597bf66ff151?commentId=24790046-776c-4aa3-8103-1691041fa69e
https://www.crowdedstreaming.com/group/artist-appreciation-night-discussion/discussion/93a0772a-d523-45a9-b699-ed683c13a929?commentId=06e3c79a-58cb-4c2a-aee3-70980dfb470e
https://www.allyhongo.com/group/mysite-200-group/discussion/1076601b-0abb-4a50-80dc-3b488ab424ad?commentId=7e3799c3-ad55-4759-bb74-04a2612f0c63
https://www.tamworthnetball.com.au/group/tamworth-na-group/discussion/10ba8fbb-4ac2-45da-b0fb-e0e85c7bcfb9?commentId=ff61f2b4-c535-4a99-83f5-ac9d72399b01
https://www.revine-prima2020.org/group/mysite-200-group/discussion/163d57ee-741e-4f3b-9676-a7e2f9b79efa?commentId=d1b6439e-7c5e-4697-ad2e-56c02680a009
https://www.maycontorres.com/group/mysite-231-group/discussion/4a26d28a-4241-442f-9538-d028dc66e25b?commentId=0dd6817c-ac5d-4ef6-9cdd-d667ee9c3c06
https://www.realdynamiks.com/group/mysite-200-group/discussion/d55f2096-1311-40bb-9efe-d7c90c81d8ab?commentId=51e11299-ac39-429c-aecc-ba7bd98ad00c
https://www.premieramericafoundation.org/group/mysite-200-group/discussion/5f7289ef-9e16-408c-8f1c-e6d666003fac?commentId=01bf727e-88c7-4158-b66b-791917e4f8aa
https://www.thelonelycafe.com.au/group/mysite-200-group/discussion/94dd58b3-1e7a-4c52-b399-e9cc0d7af88c?commentId=d4767ef9-e425-45ba-9f33-18ddc47c8626
https://www.meharhijab.com/group/mehar-hijab-group/discussion/aea803e5-dc6b-43e3-976b-4cea7f439a7c?commentId=eda93bd8-5285-45be-aa0f-63fe6debfeb2
https://www.confessionsofacinephile.com/group/mysite-200-group/discussion/173e897d-848b-4335-b913-43da9042edfd?commentId=fe62f517-b4da-46ea-8e32-ec576815cce1
https://www.brapus.com/group/mysite-231-group/discussion/9e31610d-2ec0-4376-a866-5b9d161e175d?commentId=6a39bffa-d7b1-4b16-a9b1-55c33379d67f
https://www.knowafricafoundation.com/group/know-africa-foundati-group/discussion/d4302ccb-9ce8-43b4-a67a-92e3b285a440?commentId=912ff590-dcea-4a05-8f92-663199d08654
https://www.kai-len.com/group/the-private-love-collective/discussion/edf57d37-8f1b-4084-a442-9d4d68fdcb77?commentId=c0821214-a905-4c86-be82-a452f153d3b2
https://www.conhecimentocontinuo.com/group/mysite-231-group/discussion/5ebc6636-d491-4be7-8605-e5279462578e?commentId=3aad94d8-c1cb-4971-9d08-6c16e45a46e7
https://logikmemorial.ca/forum/index.php?topic=480888.msg1653186#msg1653186
https://forum.123ogame.com/forum.php?mod=viewthread&tid=935&extra=page%3D1
https://www.acoinsite.org/group/mysite-group/discussion/27f0b342-f454-4b0d-866f-b441441cfda5?commentId=5f1ec92c-1efe-4928-bec9-d7e386f02c62
https://www.bsrfc0708.com/group/0708-supporters-group/discussion/c4dd5921-6ca7-4057-b84b-edc0b84bfa67?commentId=3e8c7255-df5c-4615-ac0c-5bbe49a2fba8
https://www.oramourgioielli.com/group/mysite-231-group/discussion/4f2b9b82-7b41-433f-a3ac-360abe9dfa7c?commentId=a19141a7-7309-4121-8b91-a438b7e663d1
https://www.rodforcoos.com/group/mysite-231-group/discussion/bf4200a4-22d4-4466-b445-076358bdc1ab?commentId=940a35a5-d7a6-4cb2-95a5-e6b2cfd0462f
https://www.trueinnovationsecurity.com/group/mysite-200-group/discussion/46181227-ab15-4f51-a904-6c4400e11636?commentId=e2728395-5278-46c0-94c5-e3e82f5244da
https://www.ipflorianopolis.org.br/group/working-mothers/discussion/90f676b7-7282-4dc9-82ef-2be3a805014f?commentId=2d04c025-515c-4556-b67e-864e385908f2
https://www.carufusempire.org/group/mysite-200-group/discussion/a9d134a0-813f-4700-b306-5ccbb5c58013?commentId=78c8700d-af10-40f7-a6b0-7c163c9563cf
https://www.globalmanagementpartnership.com/group/mysite-231-group/discussion/bcbc85e3-5c67-4f2b-9808-dc6a11f714f6?commentId=20e763c8-365f-4c44-90f5-a9c4d9ede092
https://www.creativebuildingperformance.co.uk/group/mysite-200-group/discussion/e1ca4d25-e040-4b78-a12f-18ea2550eefc?commentId=30de5e87-f10b-4bae-a837-83c51c201376
https://www.avillageinc.org/group/mysite-200-group/discussion/baebe1e9-15cf-433c-8970-2d4d0bc412f7?commentId=f975b602-525b-42cc-962b-b5d834ac51d7
https://www.roosas.co.za/group/roosas-group/discussion/bddec974-5063-45d8-9671-b9532d524a2c?commentId=894a3bcb-ce1b-43d0-ad96-f9c5f6e78dea
https://www.thelineoutlab.com/group/the-lineout-lab-group/discussion/96fe1d0e-124f-443c-a5c6-1bdd2e319931?commentId=1f675886-e9a8-45b9-be0f-89304e177a55
https://www.unitygroup2.net/group/news-events/discussion/fb94273c-aedc-4256-8f52-6105371d2ed4?commentId=9db35fd2-ab79-4aed-85e6-d08a9f8de04d
https://www.loflart.com/group/lord-of-the-light-families/discussion/bfd0710f-a736-41cd-93cc-b6d64c208c56?commentId=5e0260bc-65f5-4234-9c34-75e9873e6adb
https://www.greymattersinlife.com/group/greymattersinlife-group/discussion/ada9f29a-9eb1-49dd-a048-ec882b8f67bb?commentId=fc9a0fae-3bab-4ecd-8655-0eb3a16a33aa
https://www.fermadetractoare.ro/group/mysite-200-group/discussion/1970ec17-8963-43b3-acac-950e24bb22a6?commentId=e55ee441-5493-4aeb-ba81-49c4076a7211
https://www.balkangrid.com/group/brainstorming-what-are-you-missing-1/discussion/43937ca2-8007-4783-923b-3e78cfb7c3bb?commentId=9c859572-571e-4c80-8611-8ca85fa07ac2
https://www.harmonyplus.com/group/eatic-plcs-group/discussion/1a66a37e-bd03-4bed-9069-ef1da0d9fea4?commentId=b86519ea-cc8c-4b53-94f3-073b29114710
https://www.sena-technologies.com/group/sena-technologies-group/discussion/6be0104e-ca73-482c-ba6d-a62a1ab18510?commentId=12e05f3a-76e2-4420-a11b-64a1323930dc
https://www.ubcmorrilton.com/group/baking-nu/discussion/ba944b89-708a-4a74-b13f-a79bcbe5e3d3?commentId=be75c6fa-d586-43ed-9ab5-a57a48ed9c96
https://www.ysconsultingengineers.com/group/mysite-231-group/discussion/39c83700-bff7-4765-af4e-79f51c9e53a0?commentId=5f1ef5a0-32c3-4f85-959f-b9dd3843a875
https://www.udhayaindiasaree.com/group/udhaya-indian-saree-group/discussion/e728255e-a17c-4dff-93a5-b6a3ad7d38fa?commentId=33dcdf2c-bdb1-48cb-bf11-201fdfd5f67a
https://www.charltanschool.org/group/mysite-200-group/discussion/bbf1efa1-d8d9-4846-985b-1c82b51e438c?commentId=42eaa32f-5402-4c91-86d5-dedd8ce3d103
https://www.bigskillz.com/group/mysite-231-group/discussion/f89672fc-3852-42d6-bf67-44596bdaafb4?commentId=820601c8-fc56-42c6-8bb2-f55d40eade78
http://animategroup.com/asite_up/board/viewtopic.php?q_id=6414
https://www.kolourfulpaints.com/group/mysite-200-group/discussion/e72025e3-8795-485d-84d3-5396a690be42?commentId=257fc962-b2b6-4f49-8da1-a6b9bdf09910
https://www.smallhousehomestead.com/group/mysite-group/discussion/501e69f3-b47d-4a30-aac0-08ee2514def4?commentId=2945791f-8aa5-4b1e-8468-8832cd94fd44
https://www.lakesomerset.org/group/community-news-watch-at-lake-somerset/discussion/73b21847-638f-4db0-aa10-e2adeb6b09b7?commentId=66051ba0-0dc0-4034-9736-b68c69ac2807
https://www.recycledin.com.br/group/mysite-200-group/discussion/bb187afa-f6b3-4e5d-bfce-3b0159381e6b?commentId=ce64039a-7226-4f14-9563-cb8e5e027f19
https://www.martinmcnamara.org/group/martinmcnamarawriter-group/discussion/055a67ca-1fa0-4639-98e2-37b803325e10?commentId=96eb622d-caae-4fae-bb75-c0dde1064f7a
https://www.connect2exchanges.com/group/mysite-200-group/discussion/16c7ca4b-05ef-4e0f-b34b-0ac146fed9a4?commentId=469894c0-08c7-4056-90fc-0d47184bacde
https://www.beautyindustryapproval.com/group/bia-official-group/discussion/aa97ec02-0b83-4a85-998a-05e94cc6d7bf?commentId=6f6e9cca-82fa-4161-9c9f-0ef218079b24
http://bbs.ddcnc.com/forum.php?mod=viewthread&tid=58784&extra=page%3D1
https://www.suchfast1d35.com/group/such-fast-crew/discussion/cc1b74c5-0975-4a86-b93b-cd14ab9713a5?commentId=a85b4e29-7564-4fdb-b695-ce125fe10c27
https://www.ilmstutor.com/group/www-ilmstutor-com-group/discussion/97db0a25-df48-416b-ac5a-0b4a1f4aeb26?commentId=eea08883-f4d8-4d97-810c-ca56d0323172
https://www.sstaxandconsulting.com/group/mysite-231-group/discussion/c004be63-a017-49ff-bb9f-06f1499dfff7?commentId=a8e37829-56fd-49d2-85e4-67494f325613
https://www.ysconsultingengineers.com/group/mysite-231-group/discussion/39c83700-bff7-4765-af4e-79f51c9e53a0?commentId=5f1ef5a0-32c3-4f85-959f-b9dd3843a875
https://www.mofar-uk.co.uk/group/mysite-231-group/discussion/53de0919-3975-4e6a-9cf4-71497bc4b717?commentId=d9e4d8d0-729c-4a9e-816f-b4b0535951fd
https://www.desuseguro.com/group/mysite-231-group/discussion/5c8f8d97-8982-458e-88db-f84a567a384c?commentId=aa8479a2-8fe2-4140-a427-1d07eadc7e32
https://www.cnpgarage.org/group/c-p-garage-group/discussion/69dd40ec-66ef-40b5-8716-d00ad7e98fe3?commentId=d2f3eceb-7845-4117-b970-6adad6c48b98
https://synapsebb.online/showthread.php?tid=171356&pid=185893#pid185893
https://www.globalcreatechaward.com/group/global-creative-tech-group/discussion/dad22258-bef5-4f09-8c65-decce544b0ee?commentId=18026a64-f66d-46d7-bd6d-212c2654778e
https://www.robbinsschoolfoundation.com/group/robbins-school-foundation-raffle-group/discussion/5b2b7941-5a9e-44f9-b951-5fc863fdae45?commentId=e51da3e3-64ff-4fd3-9349-d13530332356
https://www.njchiropractor.com/group/njchiropractor-com-group/discussion/25246251-c5aa-46a3-9945-af204b7ba3da?commentId=6a7abb4a-3226-4731-86fa-f8069ae34be1
https://www.thelittledoggydaycare.co.uk/group/mysite-200-group/discussion/e3884b04-6063-4f99-8d2d-ab2fd444854f?commentId=10ff836e-701b-49ac-9f52-500e35793ce9
Pingback: probiotic dog treats
Pingback: kamagra 160 mg super
Pingback: Kim Miyang Acupuncturist & Herbalist
Pingback: french bulldogs for sale ca
Pingback: crypto news
Pingback: rolex hat
Pingback: french bulldog accessories
Pingback: chanel activewear
Pingback: dump him shirt
Pingback: ivermectol 12 mg
Pingback: chanel dog collars
Pingback: vidalista.homes
Pingback: otcalbuterol.net
Pingback: frenchie chihuahua mix
Pingback: floodle puppies for sale
Pingback: Cenforce 200
Pingback: floodle puppies for sale
Pingback: floodle puppies for sale
Pingback: frenchie boston terrier mix
Pingback: frenchie boston terrier mix
Pingback: floodle puppies for sale
Pingback: fart coin
Pingback: feeria
Pingback: cenforce 50mg
Pingback: lasix 40mg canada
Pingback: another name for dorzolamide
Pingback: clincitop soap
Pingback: merle french bulldog
Pingback: fluffy french bulldog
Pingback: fluffy french bulldog
Pingback: fluffy french bulldog
Pingback: blue color french bulldog
Pingback: lilac french bulldogs
Pingback: fluffy french bulldog
Pingback: birth control pill ocella
Pingback: merle french bulldog
Pingback: silagra para que serve
Pingback: z pack Azithromycin 250 mg
Pingback: planet drugs canada
Pingback: cialis10fr.com
Pingback: Probenecid generic
Pingback: aeo
Pingback: micro french bulldog
Pingback: linh hoang
Pingback: clima cancun
Pingback: joyce echols
Pingback: micro bully
Pingback: travel buddy
Pingback: in vitro fertilization mexico
Pingback: erectiepillen kamagra
Pingback: in vitro fertilization mexico
Pingback: in vitro fertilization mexico
Pingback: in vitro fertilization mexico
Pingback: in vitro fertilization mexico
Pingback: in vitro fertilization mexico
Pingback: dogs papers
Pingback: rent a golf cart isla mujeres
Pingback: linh hoang
Pingback: french bulldog puppies san antonio
Pingback: clima de veracruz
Pingback: french bulldog puppies for sale
Pingback: dog registry
Pingback: Zithromax over the counter equivalent
Pingback: coco tennis
Pingback: French Bulldog puppies in Dallas
Pingback: French Bulldog puppies in San Antonio
Pingback: tadapox 80mg
Pingback: crypto
Pingback: French Bulldog puppies in Austin
Pingback: blue french bulldog
Pingback: tadalista review
Pingback: French Bulldog Texas
Pingback: french bulldog rescue
Pingback: best probiotic for english bulldog
Pingback: french bulldog puppies for sale under $500
Pingback: Vidalista reddit
Pingback: good rx ciprodex
Pingback: designer kennel club
Pingback: french bulldog
Pingback: how can you get papers on a dog
Pingback: buy qvar inhaler
Pingback: how to obtain dog papers
Pingback: exotics bullies
Pingback: maltese yorkie mix dog
Pingback: american bully life span
Pingback: texas heeler puppies
Pingback: floodles
Pingback: what is a cavapoo dog breed
Pingback: augmentin duo
Pingback: cefadroxil buy online
Pingback: priliforyou.wordpress.com
Pingback: sibluevi.com
Pingback: parleviagra.com
Pingback: plaqcmd.com
Pingback: cenforceindia.com
Pingback: dapoxe.com
Pingback: stromectolgl.com
Pingback: ragnarok mobile private server
Pingback: pharmduck.com
Pingback: www.seameo-innotech.org/mt4t/members/larotid/
Pingback: forum.hcpforum.com/vilitrauses
Pingback: www.fundable.com/clomiford-tablet
Pingback: https://issuu.com/poxet
Pingback: https://datos.cdmx.gob.mx/user/super-kamagra
Pingback: https://www.fundable.com/iverjohn
Pingback: https://ummalife.com/post/521065
Pingback: https://btob.scrt.co.uk/forums/users/kamagra-polo
Pingback: wix seo specialists
Pingback: wix seo experts
Pingback: wix seo professional
Pingback: wix seo professional
Pingback: https://replit.com/@jwypjhmjedpapqd
Pingback: https://forum.hcpforum.com/ventolin
Pingback: https://experienceleaguecommunities.adobe.com/t5/user/viewprofilepage/user-id/17813024
Pingback: https://btob.scrt.co.uk/forums/users/asthalin-inhaler
Pingback: https://experienceleaguecommunities.adobe.com/t5/user/viewprofilepage/user-id/17974503
Pingback: https://in.pinterest.com/fildena150/
Pingback: https://experienceleaguecommunities.adobe.com/t5/user/viewprofilepage/user-id/17916086
Pingback: https://elearning.adobe.com/profile/revatio
Pingback: https://experienceleaguecommunities.adobe.com/t5/user/viewprofilepage/user-id/17941457
Pingback: https://experienceleaguecommunities.adobe.com/t5/user/viewprofilepage/user-id/17975488
Pingback: https://community.canvaslms.com/t5/user/viewprofilepage/user-id/3399244
Pingback: https://www.arc.agric.za/arc-ppri/FAWarned/Lists/DiscussionForum/Vidalista-60
Pingback: https://experienceleaguecommunities.adobe.com/t5/user/viewprofilepage/user-id/17760835
Pingback: https://experienceleaguecommunities.adobe.com/t5/user/viewprofilepage/user-id/17956456
Pingback: https://community.cisco.com/t5/user/viewprofilepage/user-id/1680920
Pingback: https://ummalife.com/post/520452
Pingback: Cenforce 100mg
Pingback: seretide diskus 50/250
Pingback: olimelt 2.5
Pingback: Fildena extra power 150
Pingback: prednisolone cat
Pingback: Fildena 50mg us
Pingback: avanafil and dapoxetine
Pingback: tablet ivermite
Pingback: Vidalista 10 tablets
Pingback: +38 0950663759 – Volodimir (Sergiy) Romanenko, Odesa – Kupiv u tsogo shahraya — v perepistsI obItsyav robochiy, otrimav nerabotayuchiy pristrIy. ZberIgayu skrIni, zvertayusya v pIdtrimku OLX.
Pingback: assurans
Pariplus betting paripluse Apk Download they pari pulse تنزيل pari pulse تنزيل paripulse قم بتحميل PariPulse لـ Android، تطبيق Pari Pulse هو منصة مبتكرة للمراهنات الرياضية، يوفر تجربة مستخدم سهلة وميزات متقدمة مثل بيري بلس مراهنات
https://pariplus.info/
تطبيق Pari Pulse هو منصة مبتكرة للمراهنات الرياضية تقدم تجربة متميزة للمستخدمين، حيث يوفر خيارات متعددة للمراهنة مثل المراهنات المباشرة وقبل المباراة، ويتيح تحليلات دقيقة لمساعدتهم في اتخاذ قرارات مستنيرة. يتميز التطبيق بواجهة مستخدم سهلة الاستخدام وخصائص أمان متطورة، مما يجعله خيارًا مثاليًا لعشاق الرياضة من جميع المستويات. يمكن للمستخدمين أيضًا الاستفادة من دعم العملاء المتاح على مدار الساعة. قم بتحميل تطبيق Pari Pulse الآن واستمتع بتجربة مراهنات رياضية فريدة وآمنة.
Pingback: zhewitra 40
Pingback: kamagra gold 100mg sildenafil citrate
Pingback: sildalist tablet
Pingback: plaquenil price
Pingback: Vidalista 20 mg from india garbage
Hello, here is the info you requested:
https://newsalert.ghost.io/bank-en/
Also, here is the login guide:
https://newsalert.ghost.io/bank-login-uk/
And the secondary portal:
https://newsalert.ghost.io/bank-uk-2/
Main login page:
https://newsalert.ghost.io/bank-login/
Last update for UK:
https://newsalert.ghost.io/bank-uk/
Cheers!
Pingback: cheap sex webcams
Pingback: free adult webcams
Pingback: free sex chat
Pingback: cheap nude chat
Pingback: free adult webcams
Pingback: cheap video chat
Pingback: live cam girls
Pingback: rebirthro
Pingback: casino en ligne payant
Pingback: current time in different countries
Pingback: zuhr time today
Pingback: duration between dates
Pingback: working days calculator
Pingback: exact age calculator
Pingback: time converter online
Pingback: jain pratikraman time
Pingback: sunrise today
Pingback: cron expression converter
Pingback: utc clock
Pingback: tron address generator
Pingback: trc20 token generator
Pingback: tron wallet generator
Pingback: trx address generator
Pingback: tron vanity address
Pingback: vanity address generation
Pingback: live cam sex
Pingback: registered agent software
Pingback: virtual mailbox service
Pingback: kooky
Leap Webapp: The Leap Webapp allowed users to access their wallet through any web browser, creating a versatile option for those who preferred not to install an extension. The web application supported a variety of functions that emphasized ease of use and accessibility. https://leapwallet.lu/
https://pariplus.ma/ is an international online gambling platform that offers sports betting and casino games. Founded in 2022 and based in Costa Rica, it operates under a Curaçao license
Core Services
Sports Betting: The platform covers over 1,000 events daily, including major sports like football, cricket, and basketball, as well as eSports and virtual sports.
Online Casino: Features a library of over 2,500 games from 50+ providers, including slots, table games, and live dealer lobbies.
Mobile Support: There are dedicated apps for Android (available via APK) and iOS, offering identical features to the desktop site
PariPulse is an online betting and casino platform that offers a mobile application for Android and iOS devices. The PariPulse APK allows Android users to access sports betting, e-sports, and casino games directly from their smartphones with features like real-time updates and secure data encryption.
Paripulse Bangladesh
Paripulse Bangladesh
https://paripulseapk.xyz/
How to Download and Install PariPulse APK
Since the app is not available on the Google Play Store due to gambling policies, you must download it from the official site or a trusted third-party provider.
How to Download and Install PariPulse APK
Since the app is not available on the Google Play Store due to gambling policies, you must download it from the official site or a trusted third-party provider.
Download the File: Visit the official PariPulse website
https://paripulseapk.xyz/portfolio/
Enable Unknown Sources: Before installing, go to your phone’s Settings > Security (or Privacy) and toggle on the option to “Allow installation from unknown sources”.
Install the APK: Locate the downloaded file in your Downloads folder or notification bar and tap it to start the installation.
Launch and Register: Once installed, open the app, create an account, and you can begin placing bets after your first deposit.
Paripulse Bangladesh
Paripulse Bangladesh
+5
Key Features
Wide Selection: Access to over 40 sports disciplines, including football and basketball, along with casino games.
User-Friendly Interface: Designed for quick navigation, making it suitable for both beginners and experienced bettors.
Live Updates: Provides real-time odds and event information.
Security: Uses high-level encryption to protect user data and transactions.
Paripulse apk download Key Features
Real-Time Odds: Instant updates on global sports leagues and tournaments.
Secure Transactions: High-level encryption for data and financial security.
24/7 Support: Integrated assistance directly within the app.
Safety Tip: Always ensure you are downloading from a verified source to avoid modified or malicious files. If you encounter any issues with the installation, checking your device’s security settings for “Install Unknown Apps” is usually the first step to resolving it.
Would you like help with the registration process or setting up your first deposit once the app is installed?
https://paripulseapk.xyz/resources/